
给袋式包装机取袋机械手机构的原理与组成
发布时间:2020/11/4 15:34:44
修改时间:2022/8/23 16:13:53
发布者:温州裕东
联系电话:15858518818
关键词:
描述:
给袋式包装机传动系统调频电机传递运动和动力于传动主轴,经分路传动再传递给取袋机械手。由下图取袋机械手机构简图可知,传动主轴转动,固连在传动主轴上的联动凸轮旋转,分别带动两个滚子从动件摆动。因此,在机构中可认为有两个原动件分路传动,联动凸轮中每个凸轮代表一个驱动件。一个周期内,调频电机输出一定转速,预制袋被送至起始位置处,由取袋器夹夹持,凸轮(1)旋转(回程运动),摆杆(3)随之摆动,摆杆与大臂杆属于同一连杆,绕转动中心 A 点做顺时针方向转动,这是取袋机械手机构第一关节的摆动运动;此时凸轮(2)转动(推程运动),与之配合的摆杆固结于主动链轮上,摆杆在摆动的同时带动链轮转动,以大臂作为载体,通过链条传递运动和动力,驱动从动链轮做逆时针方向旋转,带动小臂杆(即第二关节)摆动(小臂与从动链轮固连)。当凸轮(1)近休止时,大臂停止,凸轮(2)继续旋转,当小臂转至转盘夹手处凸轮(2)进入远休止阶段,预制袋夹持动作结束后,凸轮(2)远休止结束,凸轮(1)推程,大臂做逆时针摆动,凸轮(2)开始二次推程,继续做逆时针方向旋转,以便末端执行器绕开转盘机夹,避免与之干涉,凸轮(2)二次推程结束立即进入回程阶段,小臂做顺时针旋转。当凸轮(1)推程结束进入远休止阶段时,大臂停止摆转,凸轮(2)继续做顺时针转动,当其开始近休止时,机械手重新夹袋,重复作业。两个(路径)传动协调配合,预制袋被夹持在取袋器夹上,实现取袋、送袋、夹袋动作。
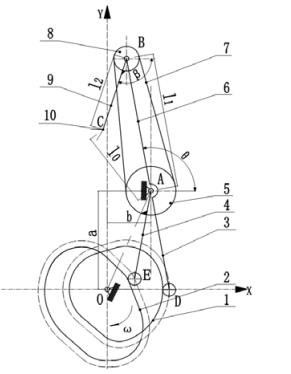
给袋式包装机取袋机械手机构简图
本文由网络转载,仅供给袋式包装机爱好者研究学习,若涉及侵权,请联系客服删除。
|
上一条:给袋式包装机取袋机构装置的优化 |
下一条:给袋式包装机撑袋机械手的工作原理 |

