
浏览量:
1411
给袋式包装机撑袋机械手的工作原理
发布时间:2020/11/5 14:39:57
修改时间:2022/8/23 16:12:51
发布者:温州裕东
联系电话:15858518818
关键词:
描述:
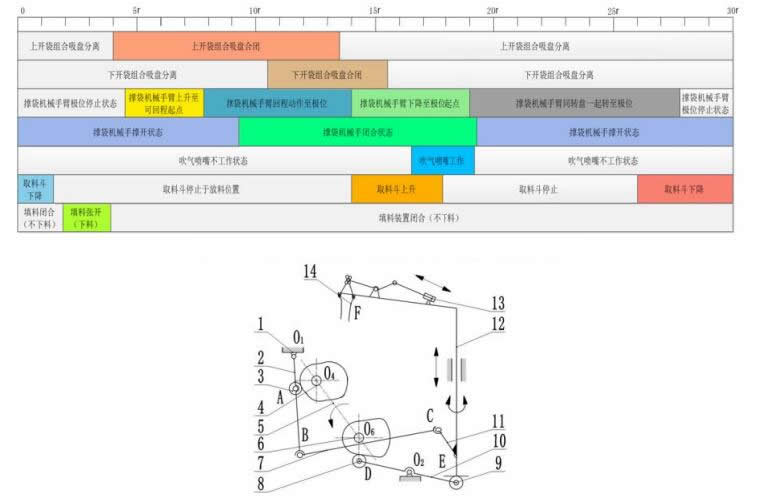
给袋式包装机撑袋机构装置及相关的运动控制时序图
1-机架 2-摆杆 3-滚子 4-撑袋旋转凸轮 5-主轴 6-撑袋升降凸轮 7-连杆 8-滚子 9-滚子连杆 10-摆杆 11-固连连杆 12-撑袋机械手臂 13-气缸 14-撑袋器夹
根据给袋式包装机包装工艺方案和时序图 ,设计的撑袋系统的机构运动简图如图所示。给袋式包装机撑袋机械手工作于第三、第四工位的衔接过程中,当预制袋到达第三工位时,吸盘吸附并打开袋口,PLC 系统根据时序发出指令通过喷嘴向袋内吹气,将袋吹至完全膨胀状态。主轴带动旋转凸轮和升降凸轮转动,升降凸轮驱动摆杆摆转,与连杆铰接的滚子连杆带动机械手臂升降,使得撑袋器夹托板随轴下降至袋内一定深度,此时撑袋气缸动作将托板打开即撑袋(此时吸盘停止吸附);旋转凸轮驱动摆杆摆动,连杆通过球铰链 B、C 连接连杆(2、11),摆杆(2)经过连杆(7、11)带动撑袋手臂转动,实现撑袋机械手(撑袋器夹保持撑袋状态)与包装袋随转盘同步转至下一工位充填放料。待放料结束后,撑袋器夹上升然后返回至起始位置,这一过程的工作原理与之前的正好相反。机械手托板主要实现了两个动作,即升降和旋转,这两个动作是三维空间作业。升降和旋转机构都采用凸轮连杆机构,其中升降机构选用了平面凸轮连杆机构,旋转机构采用空间凸轮连杆机构。
机构运动简图中包含了两个闭式运动链,一个是由机架、摆杆(2)、连杆(7)与连杆(11)组成的空间四杆机构 RSSR 型曲柄摇杆机构,另一个为由机架、摆杆(10)、连杆(9)与手臂杆组成的 RRLP 型四杆机构。
本文由网络转载,仅供给袋式包装机爱好者研究学习,若涉及侵权,请联系客服删除。
下一条:给袋式包装机的撑袋机构装置 |

