
浏览量:
921
给袋式包装机的夹袋和放袋
发布时间:2020/10/24 12:06:38
修改时间:2022/8/23 16:13:53
发布者:温州裕东
联系电话:15858518818
关键词:
描述:
给袋式包装机的取袋机构主要有吸附式、机械夹钳式、磁力吸附式和承载式机构等。对于给袋式包装机的包装过程和包材而言,主要应用到的机构类型有:吸盘吸附式机构和机械二指夹持式机构,如下图:

吸盘吸附式机械手末端执行机构(左-4 吸嘴,右-8 吸嘴)

二指夹持机械手末端执行机构
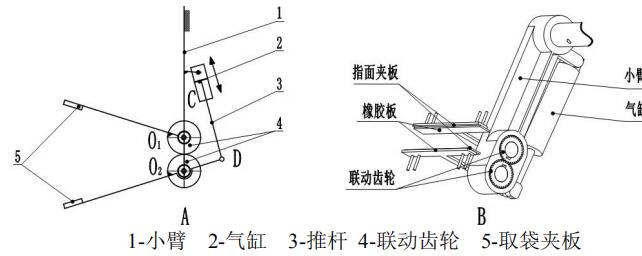
给袋机取袋机械手二指夹持机构(A-机构简图,B-结构视图)
举例如果包材是复合薄膜袋,如果采用吸盘吸附式机构,首先机构会增加气动元件,比较复杂;其次,吸盘吸附的受力点一般是袋的中间部分,在吸附和送袋时会对薄膜袋的平整性产生一定影响,不利于机夹夹袋作业。机夹夹手完成包装作业最佳的情况是夹持预制袋的边缘部分,距离袋口上边缘 8~15mm 范围内,这要求袋的平整性和送袋过程中袋不发生变形。因此,采用机械二指夹持式机构,如上图所示,当手指(取袋夹板)到达取袋位置时,通过 PLC 控制气缸动作,推杆带动联动齿轮转动,使得上下夹板闭合夹袋,完成取袋动作。这种机构手指指面设计成扁而长的平面状,配合预制袋的袋型特征,同时,为了保证可靠夹袋,夹板指面上贴有 2~3mm 厚的橡胶片。取袋夹持动作是个简单的开合动作,两个手指是对称结构,所以这一开合机构的动力源设计成气动元件,通过小型气缸的推杆的往复运动并结合联动齿轮实现机械手手指的开合动作,以实现夹袋和放袋作业。
本文由网络转载,仅供给袋式包装机爱好者研究学习,若涉及侵权,请联系客服删除。
|
上一条:给袋式包装机送袋与取袋机构的设计 |

