
浏览量:
313
给袋式包装机的取袋机械手方案设计
发布时间:2020/10/9 10:20:32
修改时间:2022/8/23 16:18:25
发布者:温州裕东
联系电话:15858518818
关键词:
描述:

YD810-2331 给袋真空包装一体机
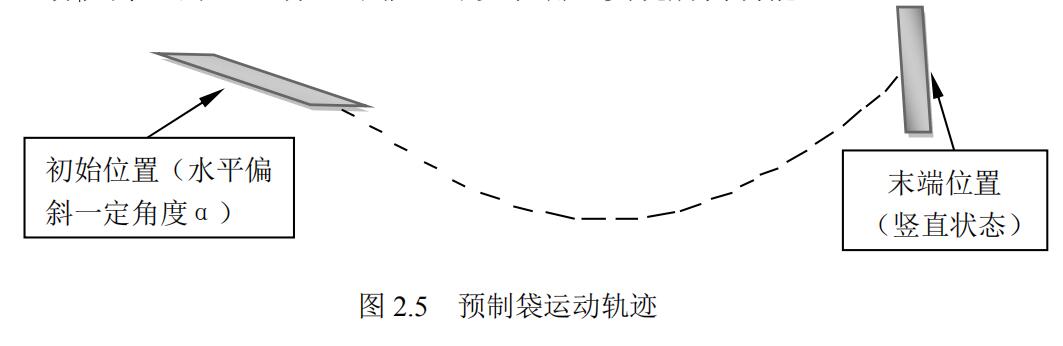
对于储袋器上升与取袋动作,我们可以采用四连杆机构、凸轮四连杆机构、气动元件、组合凸轮连杆机构等去执行,预制袋的运动轨迹近乎一段弧线,如图一所示。采用凸轮四连杆机构作为取袋机械手时,机械手和储袋器位置一般都需要设置气动元件来协调配合,否则机械手的结构和控制会比较复杂。因此,我们采用了联动式凸轮连杆机构,而储袋器的推程和回程可由一个简单的四连杆机构来实现,整个机构的运动和动力传动大部分采用机械机构和零件进行传递,纯机构装置,单驱动,操作控制简单,不但经济性好,而且运动也可靠,可以准确地实现所需功能。
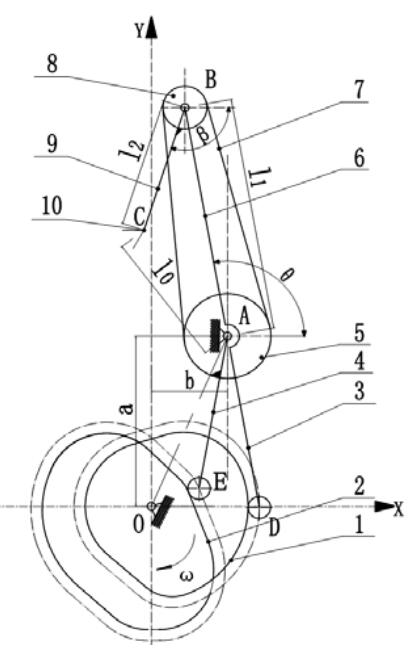
取袋机械手机构简图
1-凸轮1 2-凸轮2 3、4-摆杆 5-主动链轮 6-大臂 7-链条 8-从动链轮 9-小臂 10-取袋器夹
单驱动电机通过主轴驱动联动凸轮转动,随之两摆杆摆动。摆杆(3)即大臂绕转动中心 A 转动,摆杆(4)与其固结链轮绕转动中心 A 转动,再通过链传动机构的链条传递动力于小臂(小臂与从动链轮固连),使小臂摆动,实现小臂末端执行件-取袋器夹的作业。实际上,该机械手是由 2 自由度的平面连杆开式链机构和联动凸轮机构组成的封闭型组合机构,以实现机械手臂末端的复杂运动。
本文由网络转载,仅供给袋式包装机爱好者研究学习,若涉及侵权,请联系客服删除。
下一条:给袋式包装机的机夹与转盘方案设计 |

